We have building up to a visit from Discovery Channel Canada today, but they got in touch with us earlier in the week saying that they’d like to postpone their visit. The plan was to do a first complete system test, including lifting and walking. We almost got to that point: we lifted but didn’t walk today.
Because the Discovery Channel wasn’t here today we worked to record the video we thought they would want. The best video camera we have is also the camera we use to shoot stills of the build sessions, so this update doesn’t have many pictures. Stay tuned for video from today.
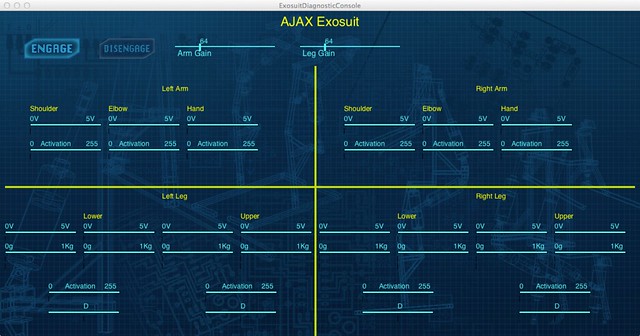
Once everything was wired up and ready to test, we were all holding our breath, but the suit didn’t move. We’ve had this experience many, many times in the past, so we expect it. The diagnostic console, shown below, indicated that the sensors were working correctly, but for some reason the actuators weren’t responding.
After some debugging we realized that the control boards weren’t receiving the command to “Engage” the actuators. For safety reasons we designed the system so that when the suit powers up, the control software doesn’t try to control the suit, that is, it starts up in a disengaged state. After some further debugging we determined that it was a timing problem: the egage command was being interleaved with commands to update the user interface. Once we understood the problem, it was an easy software change to fix it.
The next problem was more mysterious. Two of the control boards were not able to drive one of their outputs. The control boards that are responsible for the right arm and right leg were unable to actuate the cylinders assigned to Arduino pin 6. For the left leg this meant the left hip, and for the arm, this meant the right shoulder. The software looked ok, so we focused on the hardware, the board layout in particular. The board layout driving pin 6 was very simple, so that led us to believe the problem was with the Arduino chip. Swapping out the Arduino with new chips fixed the problem, which is good. The remaining problem is that we don’t know why 2 Arduinos would have failed in the same way. It is likely that there is a lurking problem we haven’t yet identified. Scary.
The third problem is that one of the control boards seems to have failed. Cole, Thelonious, Connor, and Sammy worked to etch, drill, build, and test a new control board.
As of Monday night, April 20, we have 4 working limbs! This is a huge milestone, so it looks like we’re on track to walk and lift on Sunday April 26.
Wish us luck!